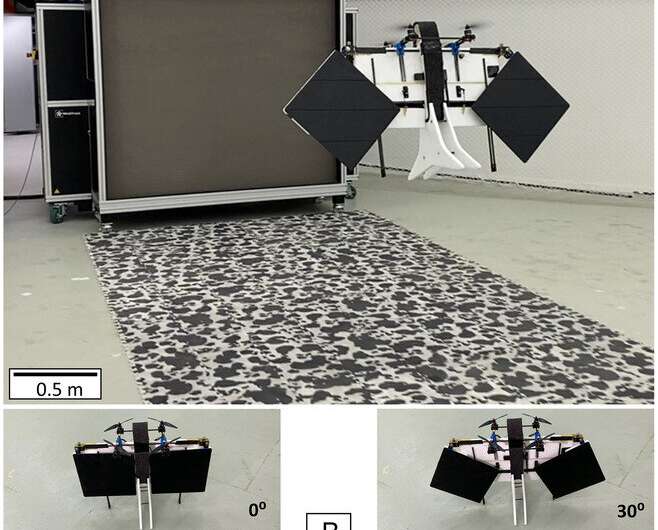
, using only onboard computation. Credit: Salzmann et al")
In recent times, pc scientists have evolved increasingly more complex algorithms for controlling the actions of robot brokers. Those come with type predictive keep an eye on (MPC) ways, which use a type of the agent’s dynamics to optimize its long run habits towards a given purpose whilst concurrently gratifying numerous constraints (e.g., can’t crash into hindrances).
Researchers at Technical College of Munich and College of Zürich just lately created Actual-time Neural MPC, a framework that integrates complicated type architectures in keeping with synthetic neural networks (ANNs) in an MPC framework for agile robots (i.e., quadrotors—drones with 4 rotors). This idea, offered in IEEE Robotics and Automation Letters, builds on a prior method evolved by way of the College of Zurich’s Robotics and Belief Staff.
“We got here throughout the very good paintings by way of the Robotics and Belief Staff led by way of Davide Scaramuzza, and had been right away captivated to construct upon their core thought of getting data-driven (realized) elements boosting ‘conventional’ keep an eye on algorithms,” Tim Salzmann and Markus Ryll, researchers on the Self reliant Aerial Techniques Staff of Technical College of Munich, advised Tech Xplore.
“When we labored out a proof-of-concept to generalize their method, which makes use of Gaussian Processes (GPs), to generic Neural Networks (Deep Finding out Fashions), we pitched our thought to the Robotics and Belief Staff on the College of Zurich. From there on, technical paintings and experiments had been collectively complex between the 2 labs, sparking a brand new collaboration.”
The brand new framework proposed by way of Salzmann, Ryll and their colleagues combines deep studying fashions and on-line optimization of MPC. Expressive deep studying fashions are computationally heavy. Alternatively, by way of approximating them on-line in real-time the framework can leverage devoted {hardware} (GPUs) to successfully procedure those fashions, permitting their machine to expect optimum movements for robots in real-time.
“The Actual-time Neural MPC framework permits for the mix of 2 fields, optimum keep an eye on, and deep studying whilst taking into account each portions to leverage their respective extremely optimized frameworks and computational units,” Salzmann and Ryll defined. “As such, we will carry out deep studying computations in PyTorch/Tensorflow on a GPU whilst the keep an eye on optimization is carried out in compiled C code on a CPU. This permits the use of the ability of deep studying in up to now unachievable packages—for instance in onboard optimum keep an eye on of a Quadrotor.”
The researchers review their framework in a chain of experiments, each in a simulated and real-world atmosphere. In those assessments, they particularly use it to keep an eye on the movements of a extremely agile quadrotor in real-time.
Their effects are very promising, as they may be able to leverage the predictive energy of neural community architectures with a parametric capability greater than 4,000 instances higher than the ones up to now used to keep an eye on the actions of agile robots in real-time. Additionally they in finding that in comparison to typical MPC strategies and not using a deep studying element, their framework can cut back positional monitoring mistakes by way of as much as 82%.
“In robotics, we search expressive fashions of the dynamics of the managed programs and their interplay with the surroundings (e.g., aerodynamic results, tire friction, and many others.),” Salzmann and Ryll mentioned. “Whilst those are incessantly laborious to formulate analytically, learning-based approaches, particularly neural networks, can seize dynamics and interplay results. Alternatively, the type accuracy scales with the scale of the Neural Community. Actual-time Neural MPC permits using deep studying fashions many magnitudes extra tough and performant in comparison to what used to be up to now possible in Fashion Predictive Keep watch over.”
As demonstrated by way of the just lately launched Nvidia Jetson platform, GPU chips are regularly discovering their means into embedded programs. The framework created by way of this staff of researchers may quickly permit builders to leverage the prime predictive energy of complex data-driven AI ways to higher type the dynamics of robots integrating GPU chips and their interactions with the surroundings, lowering the danger of injuries and making improvements to their navigation features.
“There are lots of open avenues for long run analysis,” Salzmann and Ryll added. “One drawback of deep studying approaches is that their output may also be erratic for eventualities that aren’t a part of the educational information (Out Of Distribution OOD). Detecting those eventualities and offering a fallback for the keep an eye on to stabilize the machine would result in robustness in OOD eventualities.”
Additional info:
Tim Salzmann et al, Actual-time Neural MPC: Deep Finding out Fashion Predictive Keep watch over for Quadrotors and Agile Robot Platforms, IEEE Robotics and Automation Letters (2023). DOI: 10.1109/LRA.2023.3246839
Guillem Torrente et al, Knowledge-Pushed MPC for Quadrotors, IEEE Robotics and Automation Letters (2021). DOI: 10.1109/LRA.2021.3061307
© 2023 Science X Community
Quotation:
A deep studying and type predictive keep an eye on framework to keep an eye on quadrotors and agile robots (2023, March 13)
retrieved 21 March 2023
from https://techxplore.com/information/2023-03-deep-framework-quadrotors-agile-robots.html
This report is matter to copyright. With the exception of any truthful dealing for the aim of personal find out about or analysis, no
section is also reproduced with out the written permission. The content material is supplied for info functions handiest.
Supply Through https://techxplore.com/information/2023-03-deep-framework-quadrotors-agile-robots.html